

















5 - 51
MELSEC-
A
5 DATA USED FOR POSITIONING CONTROL
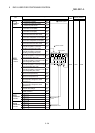
[Table 1]
Pr.11
setting value
Pr.1
setting value
Value set with peripheral device
(unit)
Value set with sequence program
(unit)
0 : Standard mode
0 : mm 0.01 to 6000000.00 (mm/min)
1 to 600000000 (
10
-2
mm/min)
1 : inch 0.001 to 600000.000 (inch/min)
1 to 600000000 (
10
-3
inch/min)
2 : degree 0.001 to 600000.000 (degree/min)
1 to 600000000 (
10
-3
degree/min)
3 : pulse 1 to 1000000 (pulse/s) 1 to 1000000 (pulse/s)
1 : Stepping motor
mode
0 : mm 0.01 to 375000.00 (mm/min)
1 to 37500000 (
10
-2
mm/min)
1 : inch 0.001 to 37500.000 (inch/min)
1 to 37500000 (
10
-3
inch/min)
2 : degree 0.001 to 37500.000 (degree/min)
1 to 37500000 (
10
-3
degree/min)
3 : pulse 1 to 62500 (pulse/s) 1 to 62500 (pulse/s)
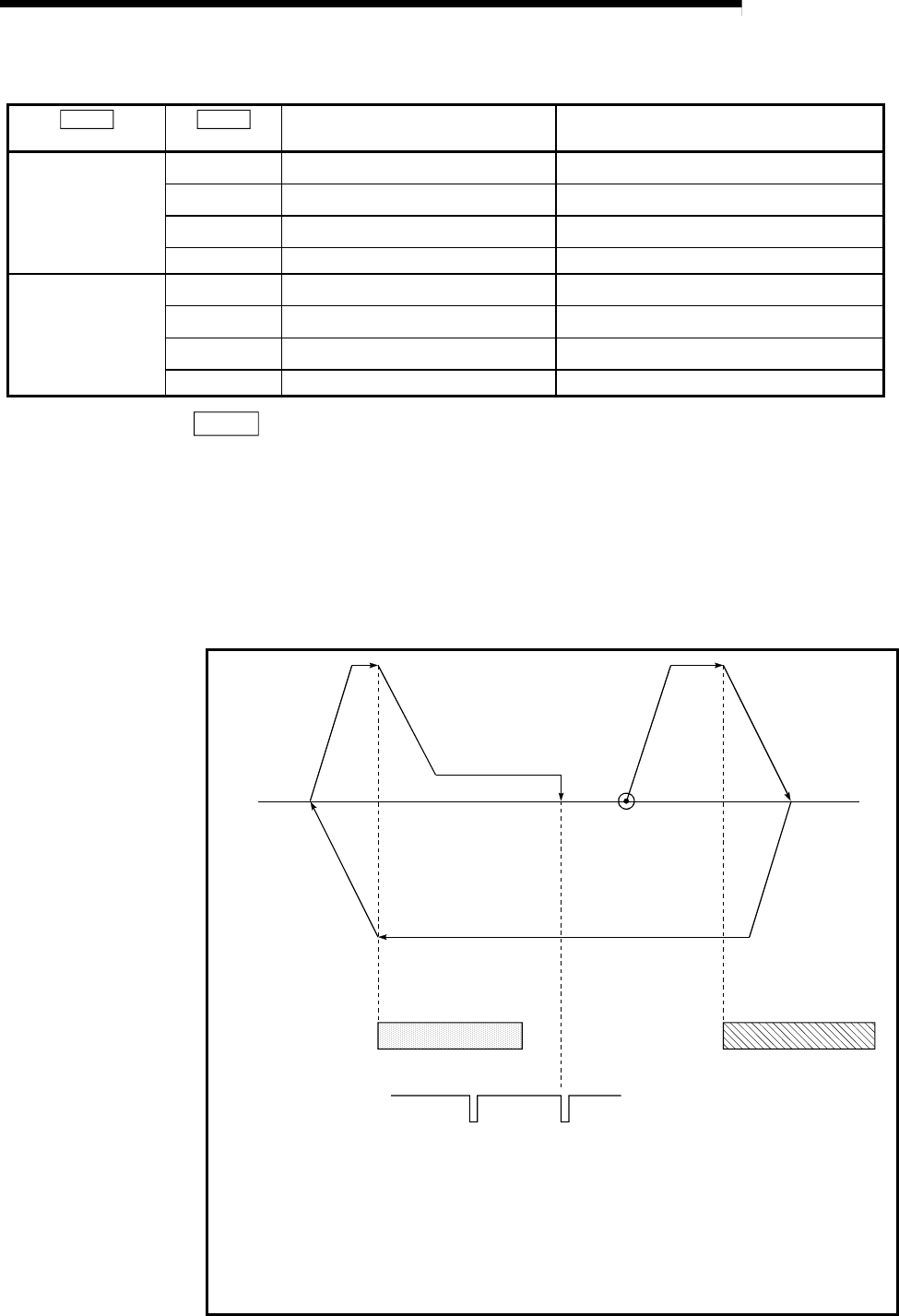
Pr.50
Zero point return retry
Set whether to carry out zero point return retry.
When the zero point return retry function is validated and the machine zero point
return is started, first the axis will move in the designated zero point return
direction (1)). If the upper/lower limit signal turns OFF before the near-point dog
signal ON is detected (2)), the axis will decelerate to a stop, and then will move in
the direction opposite the designated zero point return direction (3)). If it is
detected that the near-point dog signal has turned OFF from turning ON while
moving in the opposite direction, the axis will decelerate to a stop (4)), and then
will carry out machine zero point return again (5), 6)).
ON
Start position
Near-point dog signal
Limit signal OFF state
Zero point signal
5)
4)
6)
1)
2)
3)
[Operation for zero point return retry function]
1) Movement in the designated zero point return direction starts with the machine zero
point return start.
2) The axis decelerates when the limit signal OFF is detected.
3) After stopping with the limit signal OFF detection, the axis moves in the opposite
direction of the designated zero point return direction at the zero point return speed.
4) The axis decelerates when the near-point dog signal turns OFF.
5), 6) After stopping with the near-point dog signal OFF, carries out machine zero point
return in the designated zero point return direction.