



















Appendix - 30
MELSEC-
A
APPENDICES
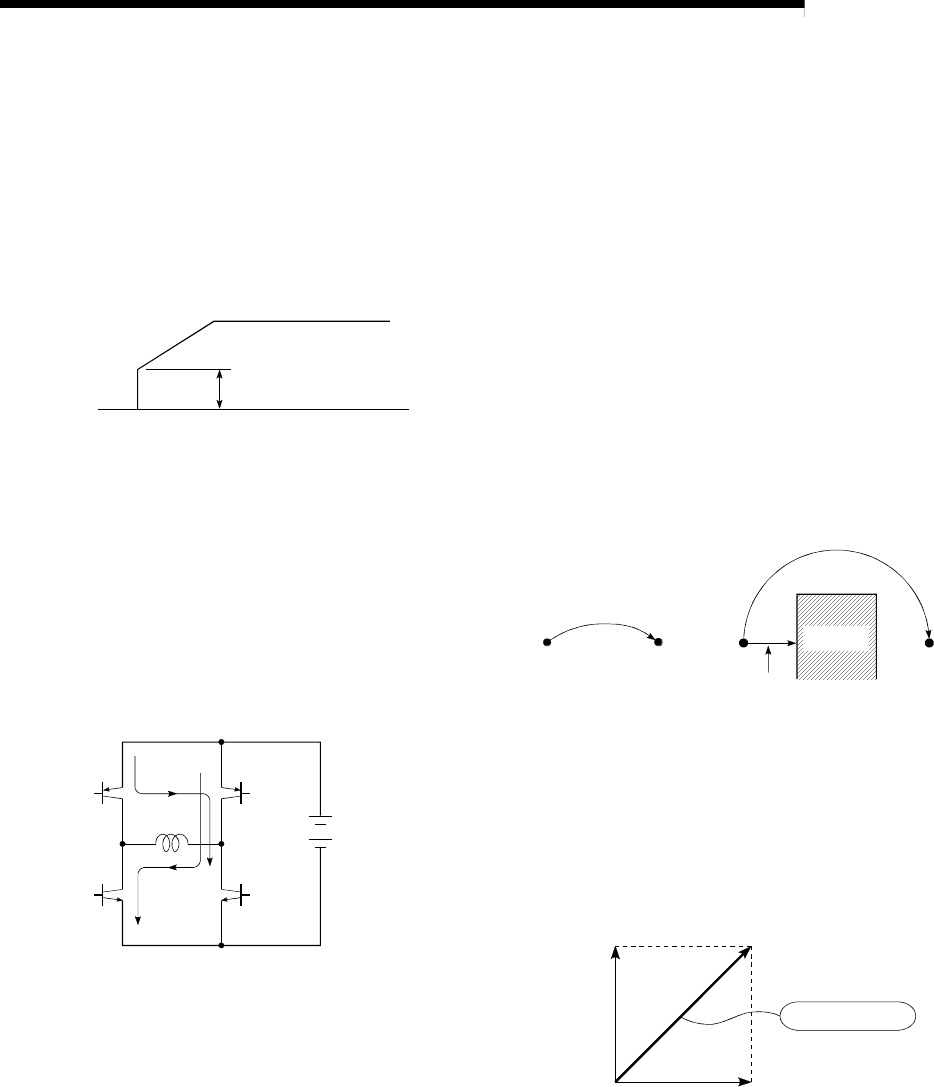
BIAS SPEED AT START
A large amount of torque is required when the
machine starts moving, but the torque may be
unstable at speed 0 with stepping motors.
Therefore, movement can be smoothly carried
out by starting the movement at a given speed
from the beginning. The bias speed at start is
the speed set at that start.
Full speed
Speed 0
Bias speed
BIPOLAR DRIVE CONSTANT-CURRENT
SYSTEM
This is one system for driving a stepping
motor. In this method, the orientation of the
excitation current flowing to the stator coil is
reversed, and the excitation current direction is
in both the positive and negative direction.
This enables the motor coil to be used
effectively, and a large output torque can be
obtained at low speeds.
Bipolar drive basic circuit (bridge method)
A phase
BUSY
The device is doing some other work. It is in a
positioning operation or in dwell time.
CCW (Counterclockwise)
Rotation in the counterclockwise direction. In
the motor, this is determined looking from the
shaft end side. Also refer to "CW".
CHANGE signal
The CHANGE signal is an external signal used
to change the speed/position control from the
speed control being executed to position
control.
CIRCULAR INTERPOLATION
Automatic operation in which the machine path
makes a circle when positioning is carried out
by simultaneously operating both the
longitudinal feed and latitudinal feed motors.
The normal unit is 90
°
. Round shapes can be
created with this type of interpolation, and
obstacles in the machine path can also be
avoided. Refer to the terms "INTERPOLATION
OPERATION" and "LINEAR
INTERPOLATION"
ABC D
Obstacle
Collision
COMMAND PULSE
Refer to the term "FEEDBACK PULSE".
COMPOSITE SPEED
The movement speed for the target control
during interpolation operations.
Y
axis
speed
Composite speed
X axis speed
CONTINUOUS POSITIONING CONTROL
Refer to the term "OPERATION PATTERN".
CONTROL UNIT
This is one type of positioning reference data.
The unit to be used is designated as mm, inch,
degree, or pulse.