


















3 - 8
MELSEC-
A
3 SPECIFICATIONS AND FUNCTIONS
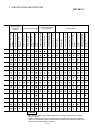
3.3.2 D75P2 main functions
The outline of the main functions for positioning control with the D75P2 are described
below. (Refer to "SECTION 2" for details on each function.)
Main functions Details
Reference
section
Zero point return control
Machine zero point return control
Mechanically establishes the positioning start point with a near-
point dog or stopper. (Positioning start No. 9001)
8.2
Data setting method zero point return
Defines the position reached by manual operation as the zero
point address.
Used for an absolute position detection system.
(Positioning start No. 9901)
8.3
High-speed zero point return control
Positions to the zero point address (
Pr.47 ) stored in the
D75P2 with machine zero point return.
(Positioning start No. 9002)
8.4
Main positioning control
Position
control
Linear control
(1-axis linear control)
(2-axis linear interpolation
control)
Positions with a linear path to the address set in the positioning
data or the position designated with the movement amount.
9.2.2
9.2.3
Fixed-dimension feed
control
(1-axis fixed-dimension feed
control)
(2-axis fixed-dimension feed
control)
Positions the movement amount designated with the
movement amount set in the positioning data.
(With fixed-dimension feed control, the "Current feed value
(RWrn+0 to 1, RWrn+8 to 9)" is set to "0" when starting. With 2-
axis fixed-dimension feed control, the linear path will be fixed-
dimension fed with interpolation.
9.2.4
9.2.5
2-axis circular interpolation
control
Positions with an arc path to the address set in the positioning
data, or the position designated with the movement amount,
auxiliary point or center point.
9.2.6
9.2.7
Speed control
Continuously outputs the pulses corresponding to the
command speed set in the positioning data.
9.2.8
Speed/position changeover control
First, carries out speed control, and then carries out position
control (positioning of designated movement amount) by
turning the "speed/position changeover signal" ON.
9.2.9
Other
control
Current value change
Changes the
"Current feed value (RWrn+0 to 1, RWrn+8 to
9)
" to the address set in the positioning data.
The following two methods can be used.
(The machine feed value cannot be changed.)
Current value change using positioning data
Current value change using current value change start No.
(No. 9003)
9.2.10
JUMP command
Unconditionally or conditionally jumps to designated positioning
data No.
9.2.11