



















9 - 22
MELSEC-
A
9 MAIN POSITIONING CONTROL
9.2 Setting the positioning data
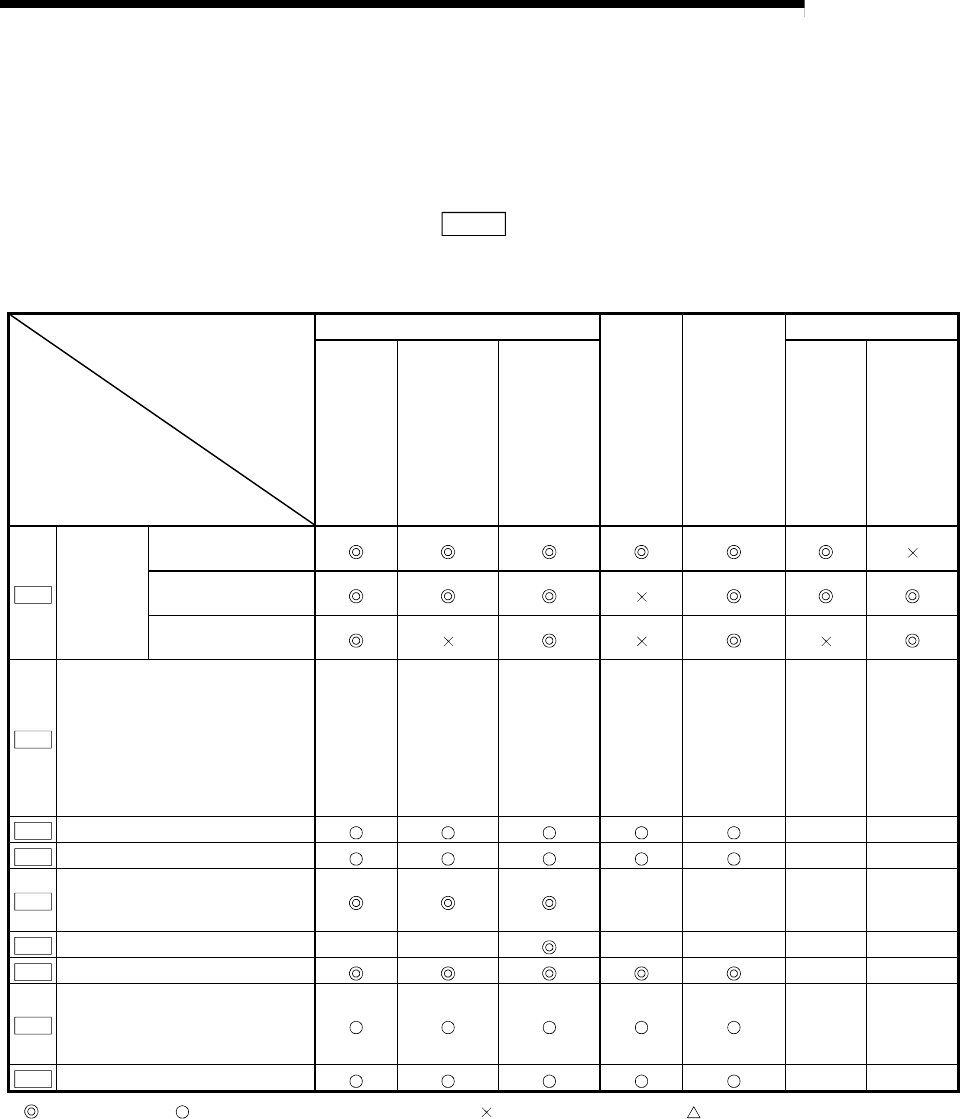
9.2.1 Relation between each control and positioning data
The setting requirements and details for the setting items of the positioning data to be
set differ according to the "
Da.2 Control method".
The following table shows the positioning data setting items corresponding to the
different types of control. Details and settings for the operation of each control are
shown in section 9.2.2 and subsequent sections.
Main positioning control
Positioning data setting items
Position control
Speed control
Speed/position
changeover control
Other control
1-axis linear control
2-axis linear
interpolation control
1-axis fixed-dimension
feed control
2-axis fixed-dimension
feed control
2-axis circular
interpolation control
Current value change
JUMP command
Da.1
Operation
pattern
Independent
positioning control
Continuous positioning
control
Continuous path
control
Da.2
Control method
Linear 1
Linear 2
*
Fixed-
dimension
feed1
Fixed-
dimension
feed 2
*
Circular
interpolation
Circular right
Circular left
*
Forward
run
Speed
limited
Reverse
run
Speed
limited
Forward run
speed/posi-
tion
Reverse run
speed/posi-
tion
Current
value
change
JUMP
command
Da.3
Acceleration time No.
– –
Da.4
Deceleration time No.
– –
Da.5
Positioning address/movement
amount
– –
Change
destination
address
–
Da.6
Arc address – –
– – – –
Da.7
Command speed
– –
Da.8
Dwell time
–
JUMP
destination
positioning
data No.
Da.9
M code
–
: Always set : Set as required ("–" when not set) : Setting not possible : Setting limited
– : Setting not required (Setting value is invalid. Use the initial values or setting values within a range where no error occurs.)
* : The "ABS (absolute) method" or "INC (incremental) method" can be used for the control method.