



















12 - 67
MELSEC-
A
12 CONTROL AUXILIARY FUNCTIONS
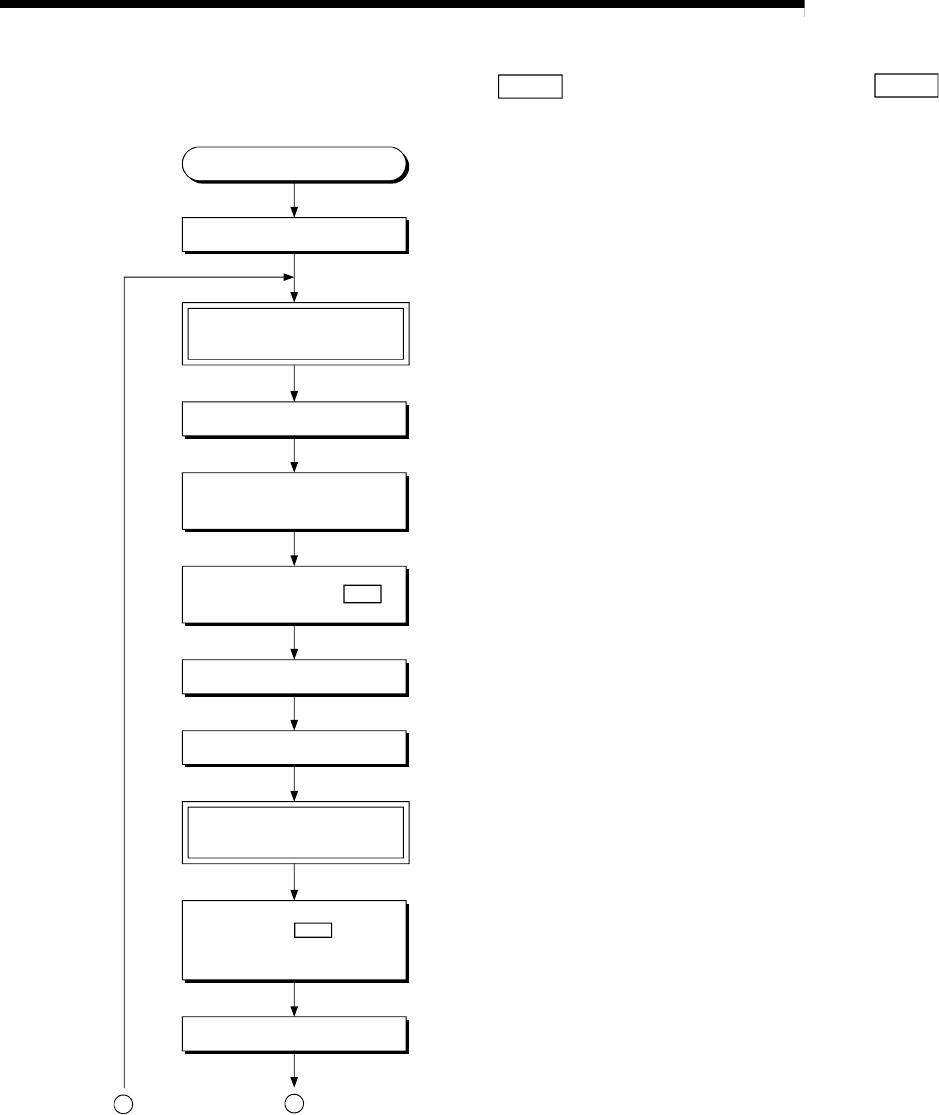
(b) When teaching to the "
Da.6 Arc address", then teaching to the "
Da.5
Positioning address/movement amount"
I
II
Set 2 in buffer memory address [1106]
Start
Carry out a machine zero point return.
Using a JOG operation or manual pulse generator.
Move the workpiece to the circular
interpolation auxiliary point using a
manual operation.
Set the target axis.
Carry out a writing request.
Set the positioning data No. for
which the teaching will be carried out.
Confirm the completion of the writing.
Move the workpiece to the circular
interpolation end point position
using a manual operation.
Set the target axis in the buffer memory address [1103].
Set the positioning data No. in the buffer memory address [1104].
Set 60F
H
in the buffer memory address [1105].
Set 2 in buffer memory address [1106]
Confirm that the buffer memory address [1106] has become 0.
Carry out a writing request.
Using a JOG operation or manual pulse generator.
Set 50F
H
in the buffer memory address [1105].
• • • • • • • •
• • • • • • • •
• • • • • • • •
• • • • • • • •
• • • • • • • •
• • • • • • • •
• • • • • • • •
• • • • • • • •
• • • • • • • •
Select "Set the current feed value
to the arc auxiliary point ( Da. 6
Arc address)" in the write pattern.
Select "Set the current feed value
to the end point ( Da. 5 Positioning
address/movement amount)" in
the write pattern.