


















3 - 15
MELSEC-
A
3 SPECIFICATIONS AND FUNCTIONS
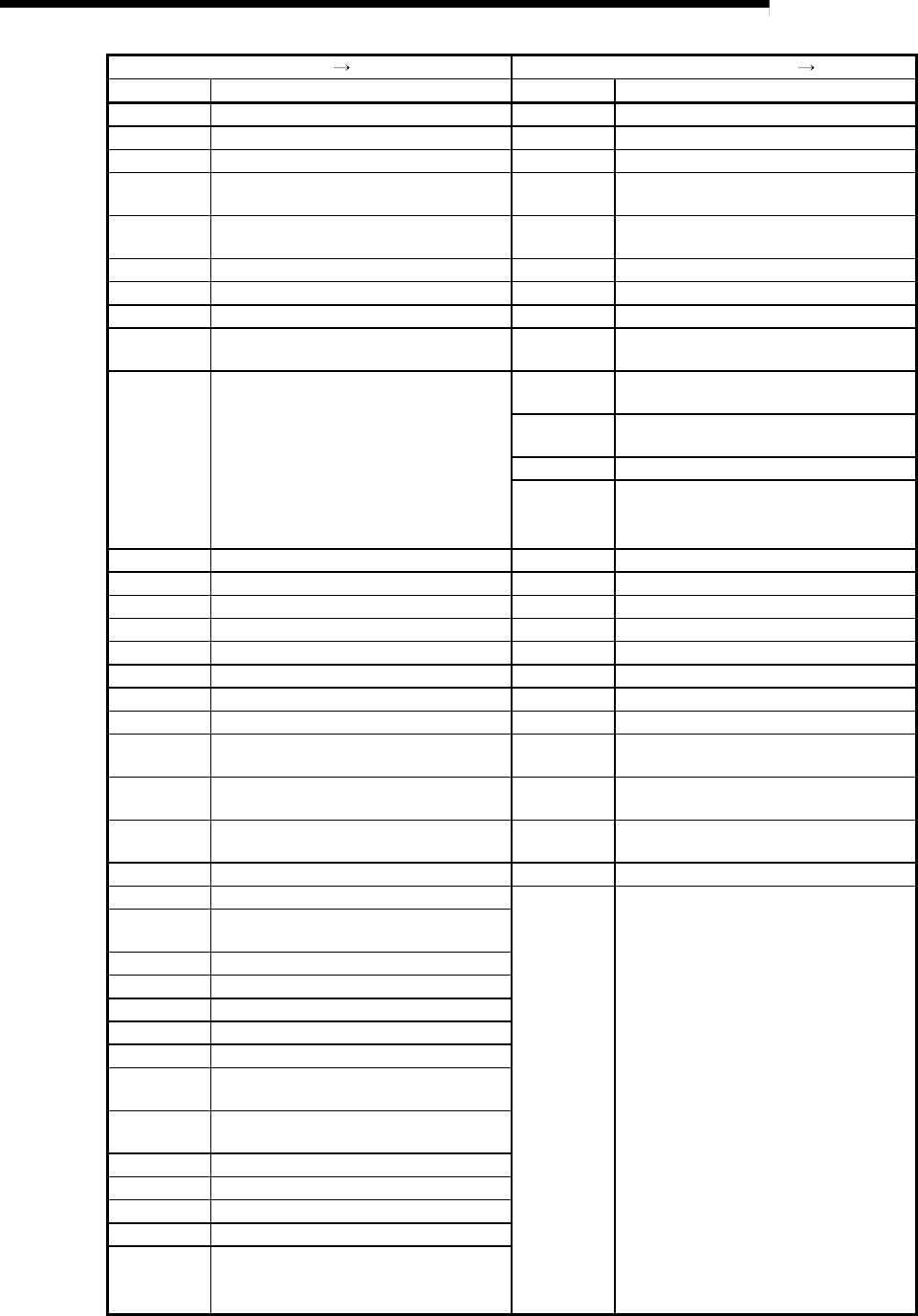
Signal direction: D75P2 master module Signal direction: Master module D75P2
Device No. Signal name Device No. Signal name
RX(n+2)0 Axis 1 zero point return complete flag RY(n+2)0 Axis 1 servo ON
RX(n+2)1 Axis 1 warning detection RY(n+2)1 Axis 1 ABS transfer mode
RX(n+2)2 Axis 1 speed change 0 flag RY(n+2)2 Axis 1 ABS request flag
RX(n+2)3
Axis 1 zero point absolute position
overflow flag
RY(n+2)3 Axis 1 deviation counter clear
RX(n+2)4
Axis 1 zero point absolute position
underflow flag
RY(n+2)4 Axis 1 error reset
RX(n+2)5 Axis 1 ABS data bit 0 RY(n+2)5 Axis 1 restart command
RX(n+2)6 Axis 1 ABS data bit 1 RY(n+2)6 Axis 1 M code OFF request
RX(n+2)7 Axis 1 transmission data READY flag RY(n+2)7 Axis 1 speed change request
RX(n+2)8
Axis 1 restart acceptance complete flag
RY(n+2)8
Axis 1 speed/position changeover
enable flag
RX(n+2)9
to
RX(n+3)F
Use prohibited
RY(n+2)9
Axis 1 manual pulse generator enable
flag
RY(n+2)A
Axis 1 zero point return request flag
OFF request
RY(n+2)B Axis 1 external start valid
RY(n+2)C
to
RY(n+3)F
Use prohibited
RX(n+4)0 Axis 2 speed limiting flag RY(n+4)0 Axis 2 servo ON
RX(n+4)1 Axis 2 speed change processing flag RY(n+4)1 Axis 2 ABS transfer mode
RX(n+4)2 Axis 2 drive unit READY RY(n+4)2 Axis 2 ABS request flag
RX(n+4)3 Axis 2 zero point signal RY(n+4)3 Axis 2 deviation counter clear
RX(n+4)4 Axis 2 in-position signal RY(n+4)4 Axis 2 error reset
RX(n+4)5 Axis 2 near-point dog signal RY(n+4)5 Axis 2 restart command
RX(n+4)6 Axis 2 stop signal RY(n+4)6 Axis 2 M code OFF request
RX(n+4)7 Axis 2 upper limit RY(n+4)7 Axis 2 speed change request
RX(n+4)8
Axis 2 lower limit
RY(n+4)8
Axis 2 speed/position changeover
enable flag
RX(n+4)9
Axis 2 external start signal
RY(n+4)9
Axis 2 manual pulse generator enable
flag
RX(n+4)A
Axis 2 speed/position changeover
signal
RY(n+4)A
Axis 2 zero point return request flag
OFF request
RX(n+4)B Axis 2 deviation counter clear status RY(n+4)B Axis 2 external start valid
RX(n+4)C Axis 2 speed controlling flag
RY(n+4)C
to
RY(n+5)F
Use prohibited
RX(n+4)D
Axis 2 speed/position changeover latch
flag
RX(n+4)E Axis 2 command in-position signal
RX(n+4)F Axis 2 zero point return request flag
RX(n+5)0 Axis 2 zero point return complete flag
RX(n+5)1 Axis 2 warning detection
RX(n+5)2 Axis 2 speed change 0 flag
RX(n+5)3
Axis 2 zero point absolute position
overflow flag
RX(n+5)4
Axis 2 zero point absolute position
underflow flag
RX(n+5)5 Axis 2 ABS data bit 0
RX(n+5)6 Axis 2 ABS data bit 1
RX(n+5)7 Axis 2 transmission data READY flag
RX(n+5)8 Axis 2 restart acceptance complete flag
RX(n+5)9
to
RX(n+5)F
Use prohibited
n: Address assigned to the master module by station number setting