



















9 - 11
MELSEC-
A
9 MAIN POSITIONING CONTROL
(d) Speed changeover
(Refer to "
Pr.20
Speed changeover mode".)
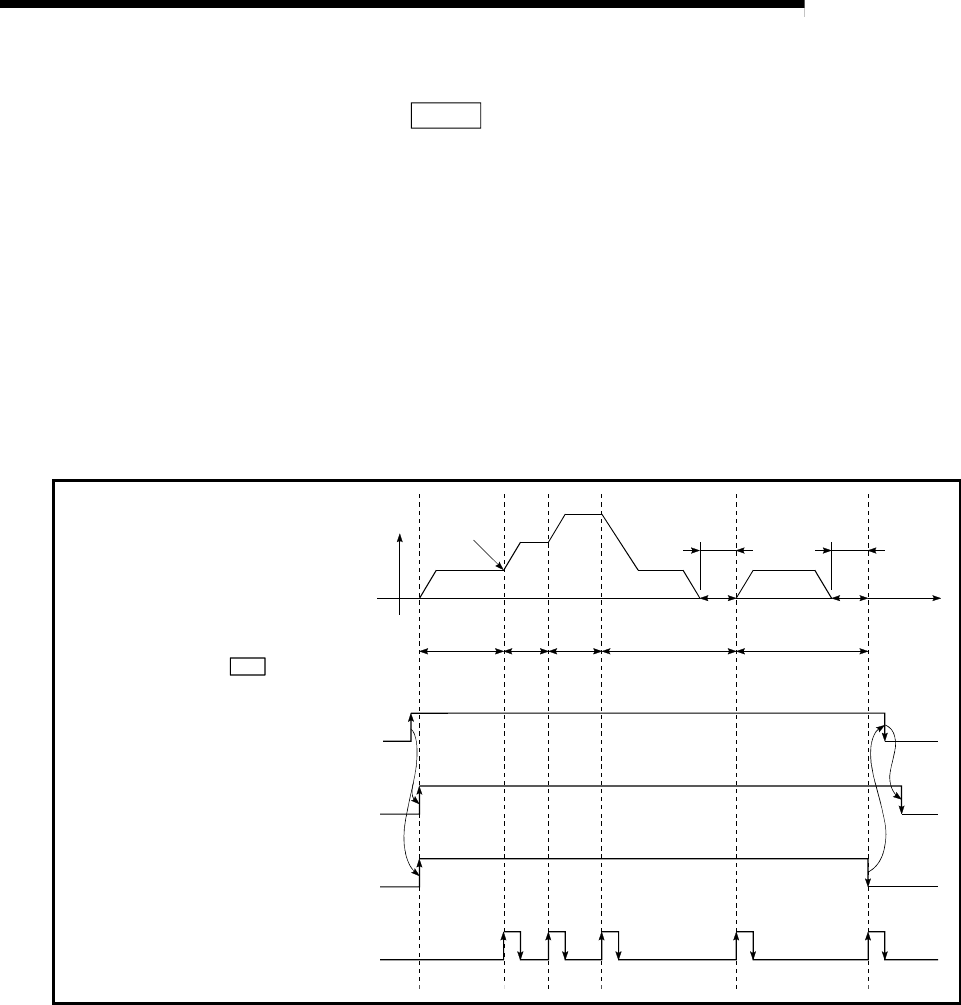
1) Standard speed changeover mode
(1) When the "positioning data for current operation" and "positioning
data for next operation" differ in command speed, acceleration or
deceleration to the speed set in the "positioning data for next
operation" starts at completion of positioning executed with the
"positioning data for current operation".
(2) The parameters used in acceleration/deceleration to the
command speed set in the "positioning data to carry out the next
operation" are those of the positioning data to carry out
acceleration/deceleration.
Speed changeover will not be carried out if the command speeds
are the same.
OFF
ON
OFF
ON
OFF
ON
OFF
ON
11 11 11 01 00
V
Dwell time
t
Speed
changeover
Da. 1 Operation pattern
Positioning
Start complete signal
BUSY signal
Positioning complete signal
Positioning start signal
[RXn7, RXn8]
[RXn4, RXn5]
[RXn1, RXn2]
[RY(n+1)0, RY(n+1)1]
Dwell time
Fig. 9.4 Operation for the standard speed changeover mode
(3) Speed changeover condition
If the movement amount is small in regard to the target speed, the
current speed may not reach the target speed even if
acceleration/deceleration is carried out. In this case, the machine
is accelerated/decelerated so that it nears the target speed.
If the movement amount will be exceeded when automatic
deceleration is required (Ex. Operation patterns "00", "01"), the
machine will immediately stop at the positioning address, and a
warning "insufficient movement amount" (warning code: 513) will
occur.