


















5 - 34
MELSEC-
A
5 DATA USED FOR POSITIONING CONTROL
Pr.21
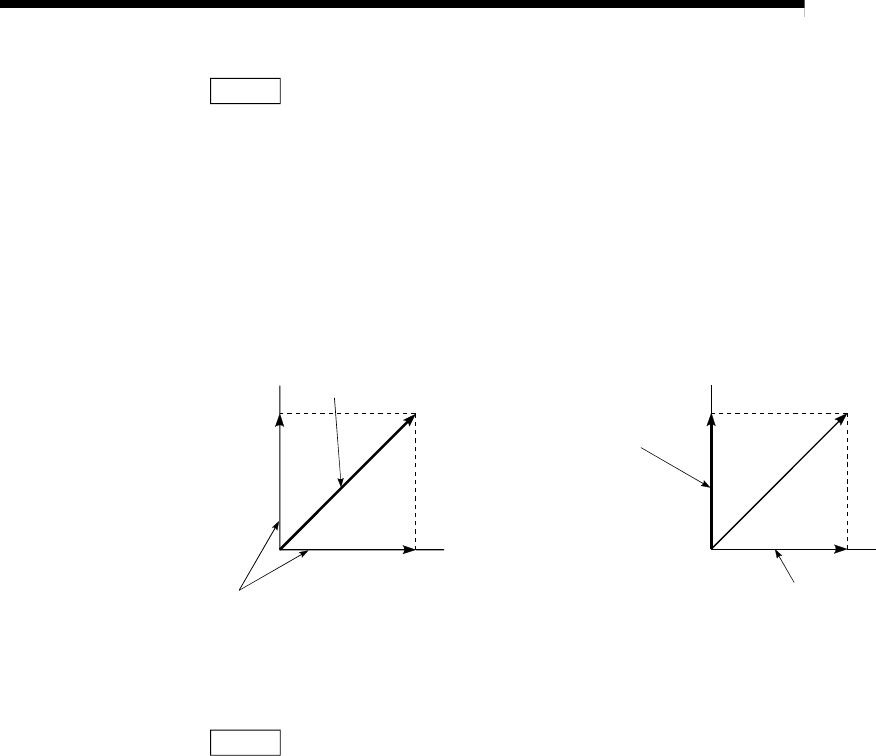
Interpolation speed designation method
When carrying out linear interpolation, set whether to designate the composite
speed or reference axis speed.
0: Composite speed .................. The movement speed for the control target is
designated, and the speed for each axis is
calculated by the D75P2.
1: Reference axis speed ........... The axis speed set for the reference axis is
designated, and the speed for the other axis
carrying out interpolation is calculated by the
D75P2.
X axis
Y axis
Designate composite speed
Calculated by D75P2
<When composite speed is designated>
Designate speed
for reference axis
<When reference axis speed is designated>
X axis
Y axis
Calculated by D75P2
Note) Specify the "composite speed" when performing circular interpolation
control.
Pr.22
Current feed value during speed control
When carrying out speed control (including speed control during speed/position
changeover control), set whether to update the "Current feed value (RWrn+0 to 1,
RWrn+8 to 9)".
0 : Do not update current feed value ..... The current feed value is not updated.
(The current feed value at the start of
speed control is held.)
1 : Update current feed value ................ The current feed value is updated.
(The current feed value is updated when
speed control is started.)
2 : Clear current feed value to zero ....... The current feed value is cleared to "0",
and is not updated.
Note 1) Set "1" when performing speed/position changeover control in the ABS
mode.