

















5 - 54
MELSEC-
A
5 DATA USED FOR POSITIONING CONTROL
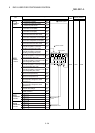
Item
Setting value, setting range
Default
value
Setting value buffer
memory address
Value set with peripheral
device
Value set with sequence
program
Axis 1 Axis 2
Pr.55
Zero point shift
amount
The setting value range differs depending on the "
Pr.11
Stepping motor mode selection" or "
Pr.1
Unit setting".
Here, the value within the [Table 1] range is set.
[Table 1] on right page
0
84
85
234
235
Pr.56
Zero point return
torque limit value
1 to 300 (%) 1 to 300 (%) 300 86 236
Pr.57
Speed designation
during zero point shift
0 : Zero point return speed 0
0 88 238
1 : Creep speed 1
Pr.58
Dwell time during
zero point return retry
0 to 65535 (ms)
0 to 65535 (ms)
0 to 32767 :
Set as a decimal
32768 to 65535 :
Convert into hexadecimal
and set
0 89 239
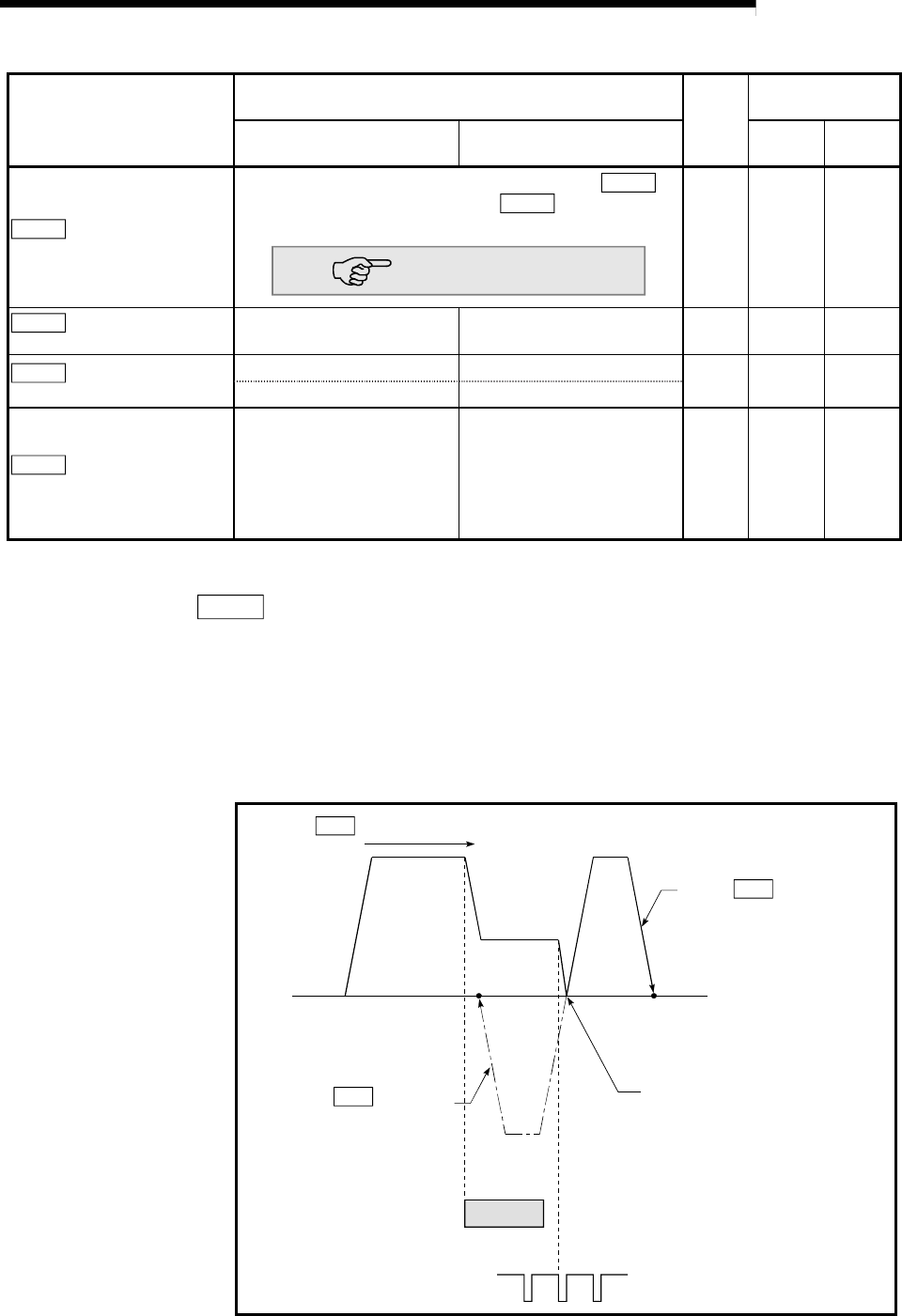
Pr.55
Zero point shift amount
Set the amount to shift (move) from the position stopped at with machine zero
point return.
* The zero point shift function is used to compensate the zero point position
stopped at with machine zero point return.
If there is a physical limit to the zero point position, due to the relation of the near-
point dog installation position, use this function to compensate the zero point to an
optimum position.
Zero point return direction
When " Zero point
shift amount" is positive
Shift point
Shift point
When " Zero point
shift amount" is negative
Start point
Shift after deviation
counter clear is canceled
Near-point dog signal
Zero point signal
Pr.55
Pr.55
Pr.46