



















9 - 49
MELSEC-
A
9 MAIN POSITIONING CONTROL
t
V
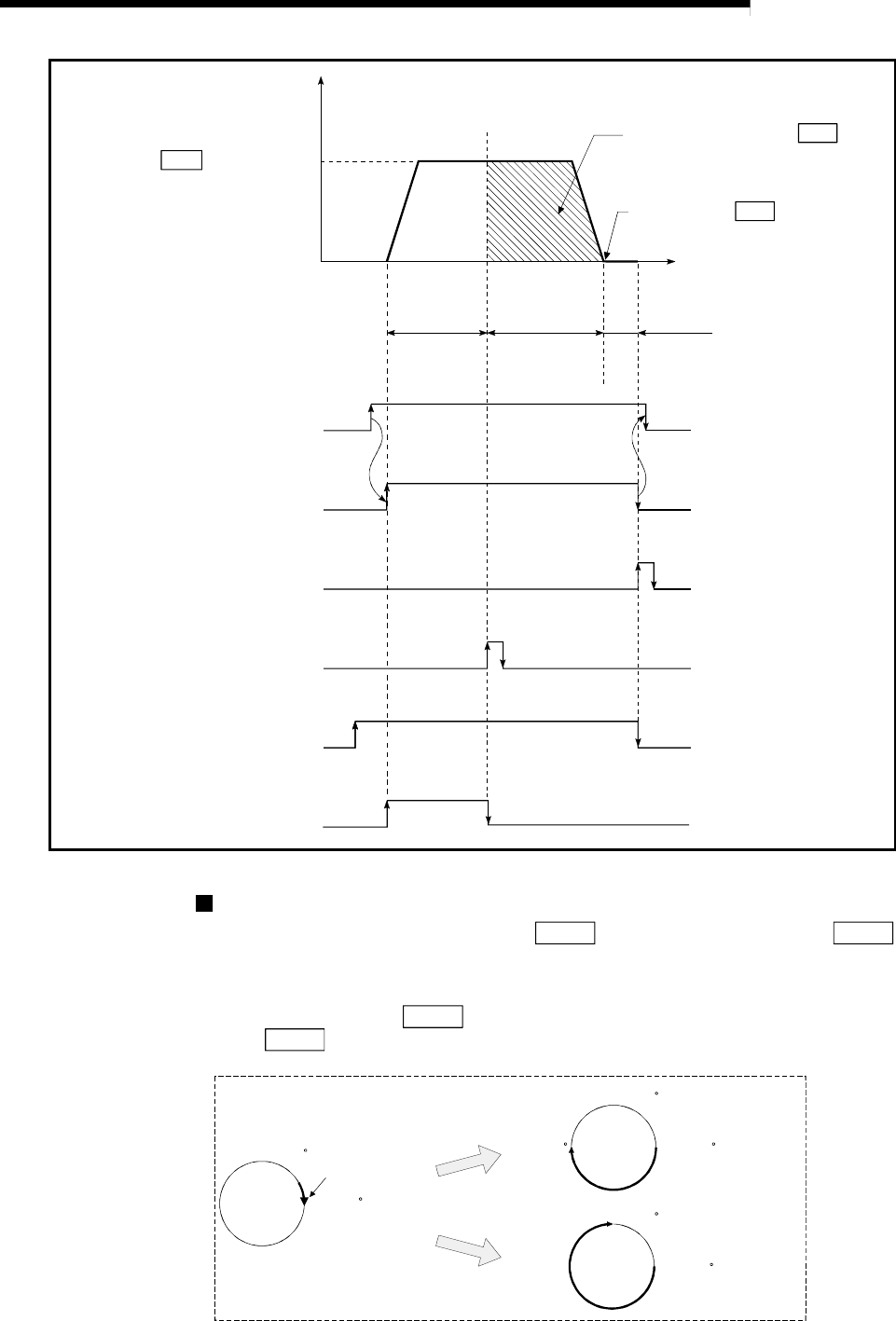
Positioning start signal
OFF
ON
BUSY signal
OFF
ON
Positioning complete signal
OFF
ON
Speed/position changeover signal
ON
Speed control
Position control
Dwell time
In speed control flag
Speed/position
changeover enable flag
Da. 7 Command speed
Movement amount set in" Da. 5
Positioning address/movement
amount" (In INC mode)
OFF
OFF
OFF
ON
ON
[RY(n+1)0, RY(n+1)1]
[RXn4, RXn5]
[RXn7, RXn8]
[RY(n+2)8, RY(n+4)8]
[
RX
(
n+1
)C,
RX
(
n+4
)C]
Address set in " Da. 5 Positioning
address/movement amount"
(In ABS mode)
Fig. 9.10 Speed/position changeover control operation timing
Operation example
The following operation assumes that "
Pr.1 Unit setting" is "2: degree", " Pr.22
Current feed value during speed control" setting is "1: Update current feed value",
and the speed/position changeover signal is input in the position of 90.00000
[degree] current feed value during execution of "forward run:
speed/position" set in "
Da.2
Control method".
(The "
Da.5
Positioning address/movement amount" setting value is
270.00000[degree].)
0.00000
90.00000
270.00000
0.00000
90.00000
Stop at 270.00000
[degree]
[ABS mode]
0.00000
90.00000
90.00000+270.00000
=360.00000
=stop at 0.00000[degree]
[INC mode]
Speed/position
changeover signal ON