



















9 - 51
MELSEC-
A
9 MAIN POSITIONING CONTROL
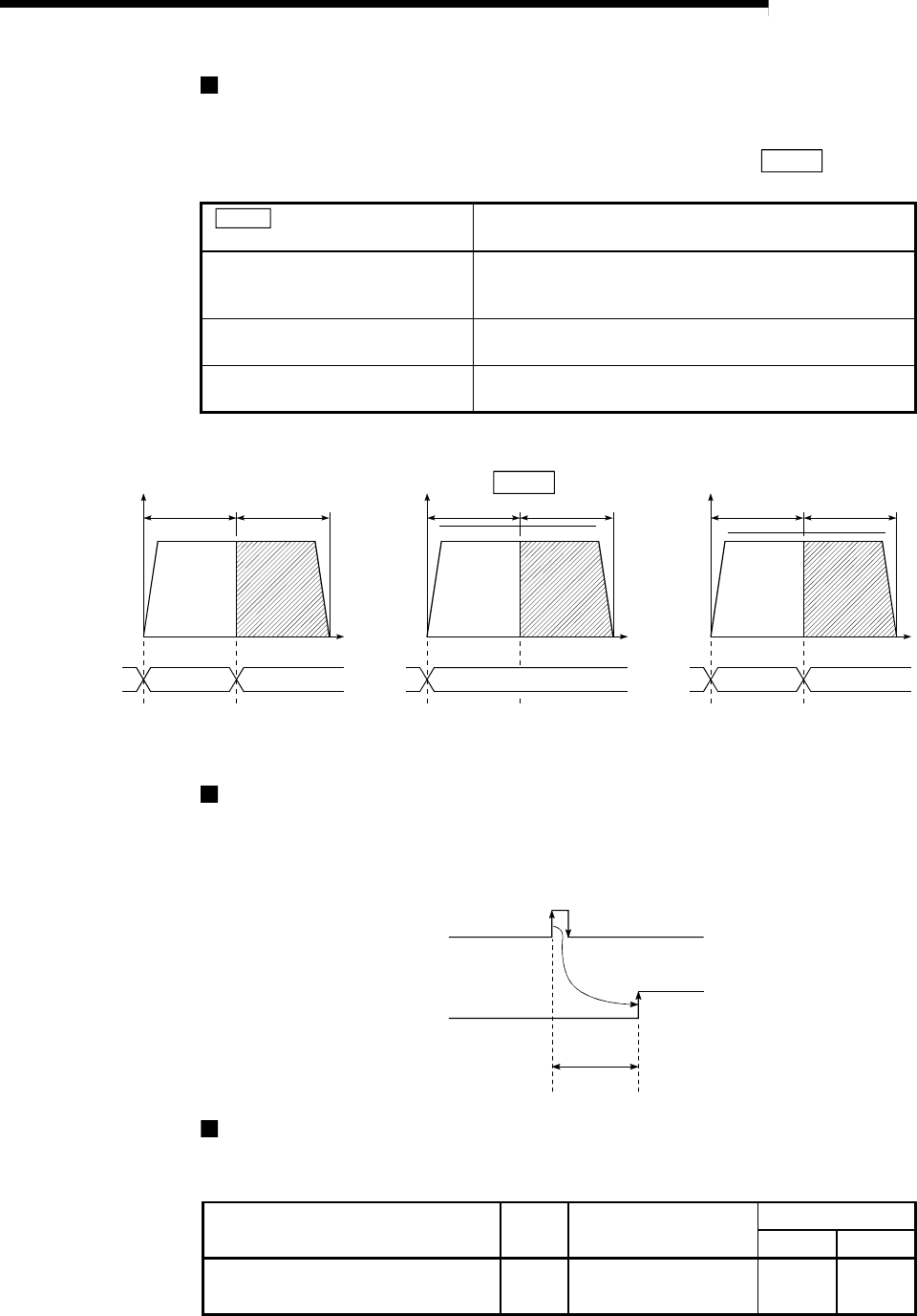
Current feed value during speed/position changeover control
(Common to INC mode and ABS mode)
The following table shows the "Current feed value (RWrn + 0 to 1, RWrn + 8 to 9)"
during speed/position changeover control corresponding to the "
Pr.22 Current
feed value during speed control" settings.
" Pr.22 Current feed value during
speed control" setting
Current feed value (RWrn + 0 to 1, RWrn + 8 to 9)
0: Do not update current feed value
The current feed value at control start is maintained during
speed control, and updated from the changeover to
position control.
1: Update current feed value
The current feed value is updated during speed control
and position control.
2: Zero clear current feed value
The current feed value is cleared (set to "0") at control
start, and updated from the changeover to position control.
[In ABS mode]
Only the setting of 1 is valid for "
Pr.22
Current feed value during speed control".
t
0
Updated from 0
t
Speed
t
Position control
Maintained
Updated
Speed control
Speed
Position control
Speed control
Speed
Position control
Speed control
Updated
(a) Current feed value not updated (b) Current feed value updated
(c) Current feed value zero cleared
Changeover time from speed control to position control
(Common to INC mode and ABS mode)
There is 1ms from the time the speed/position changeover signal is turned ON to the
time the speed/position changeover latch flag (RX(n+1)D, RX(n+4)D) turns ON.
Speed/position changeover signal
OFF
ON
OFF
ON
1ms
Speed/position changeover latch flag
Speed/position changeover signal setting
(Common to INC mode and ABS mode)
Set the following item to use the speed/position changeover signal "CHG".
Setting item
Setting
value
Setting details
Remote input/output
Axis 1 Axis 2
Speed/position changeover enable flag ON
Set "ON: Speed/position
changeover enable".
RY(n+2)8 RY(n+4)8
*For more information on the setting details, refer to section "3.4 Specifications of input/output
signals for master module".