



















5 - 45
MELSEC-
A
5 DATA USED FOR POSITIONING CONTROL
5.2.5 Zero point return basic parameters
Item
Setting value, setting range
Default
value
Setting value buffer
memory address
Value set with peripheral
device
Value set with sequence
program
Axis 1 Axis 2
Pr.45
Zero point return
method
0 : Near-point dog method 0
0 70 220
1 : Stopper stop method 1) 1
2 : Stopper stop method 2) 2
3 : Stopper stop method 3) 3
4 : Count method 1) 4
5 : Count method 2) 5
Pr.45
Zero point return method
Set the "zero point return method" for carrying out machine zero point return.
0 : Near-point dog method ........ After decelerating at the near-point dog ON, stop
at the zero point signal and complete the machine
zero point return.
1 : Stopper stop method 1) ....... After decelerating at the near-point dog ON, stop
with the stopper, and complete the machine zero
point return after the dwell time has passed.
2 : Stopper stop method 2) ....... After decelerating at the near-point dog ON, stop
with the stopper, and complete the machine zero
point return with the machine zero point signal.
3 : Stopper stop method 3) ....... After starting with the creep speed, stop with the
stopper, and complete the machine zero point
return with the zero point signal.
4 : Count method 1) .................. After decelerating at the near-point dog ON, move
the designated distance, and complete the
machine zero point return with the zero point
signal.
5 : Count method 2) .................. After decelerating at the near-point dog ON, move
the designated distance, and complete the
machine zero point return.
Note) Refer to section "8.2.2 Machine zero point return method" for details on the
zero point return methods.
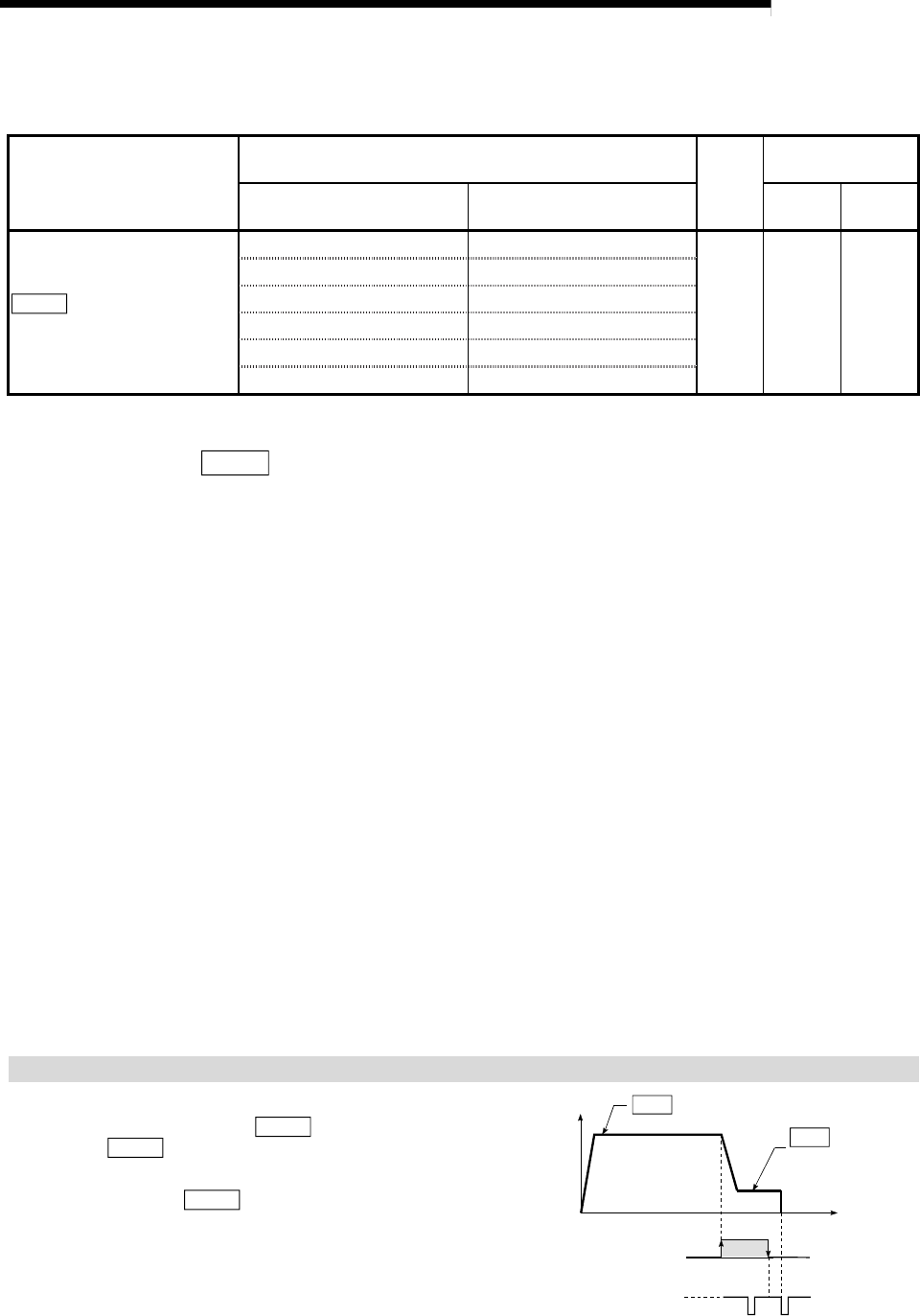
Zero point return method
0 : Near-point dog method
(1) Start machine zero point return.
(Start movement at the "
Pr.48
Zero point return speed" in
the "
Pr.46
Zero point return direction".)
(2) Detect the near-point dog ON, and start deceleration.
(3) Decelerate to "
Pr.49
Creep speed", and move with the
creep speed.
(4) At the first zero point signal (single-pulse output per motor
revolution) after the near-point dog OFF, the pulse output
from the D75P2 stops, and the machine zero point return is
completed.
t
V
ON
(1)
(2)
(3)
(4)
Near-point dog OFF
Zero point signal
Zero point return speed
Pr.48
Pr.49
Creep speed