



















8 - 20
MELSEC-
A
8 ZERO POINT RETURN CONTROL
8.3 Data setting method zero point return
The data setting method zero point return is a method in which the position reached by
manual operation (JOG operation/manual pulse generator operation) in an absolute
position detection system is defined as the zero point. (The axis is not moved in the
data setting method zero point return.) When the data setting method zero point return
is executed, the current position (position reached by manual operation) in the absolute
position detection system is registered as the zero point and "
Pr.47
Zero point
address" is stored into "Current feed value (RWrn+0 to 1, RWrn+8 to 9)" and "
Md.30
Machine feed value".
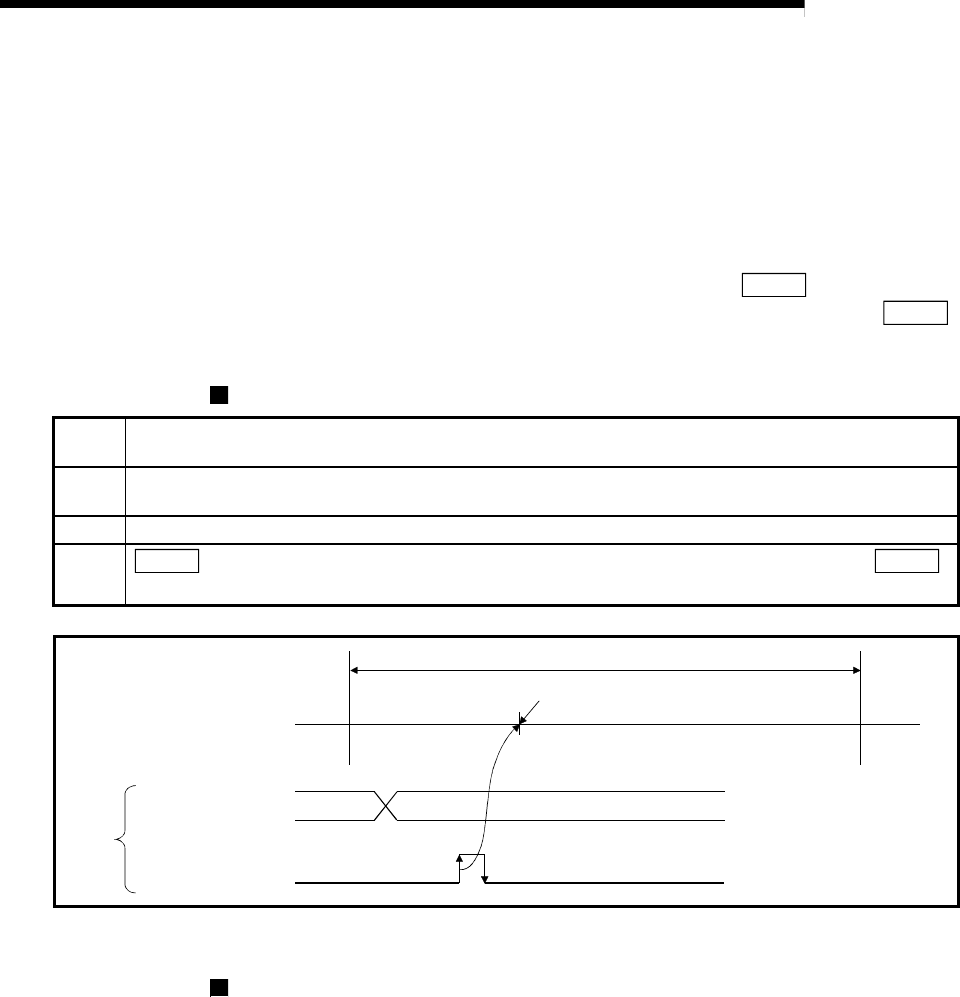
Operation chart
1)
In the absolute position detection system, perform manual operation (JOG operation/manual pulse
generator operation) to move the machine to the position desired to be registered as the zero point.
2)
Set the positioning start No. [RWwm, RWwm+8] to "9901", and turn ON the positioning start signal
[RY(n+1)0, RY(n+1)1].
3) The absolute position of the servomotor at machine zero point return execution is stored as the zero point.
4)
" Pr.47
Zero point address" is stored into "Current feed value (RWrn+0 to 1, RWrn+8 to 9)" and
"
Md.30
Machine feed value".
Positioning start No.
[RWwm,RWwm+8]
9901(Data setting method zero point return designation)
Positioning start signal
[RY(n+1)0,RY(n+1)1]
3) Stored as zero point at machine zero point
return execution
Machine movement range
1) Position reached by manual operation
2)
Fig. 8.15 Data setting method zero point return
Precautions
(1) The data setting method zero point return performed when the system is not
an absolute position detection system has the same function as a current
value change.
(2) The zero point return parameter used in the case of the data setting method is
the zero point address only.
Set the other zero point return parameters to any values within the setting
ranges.
(3) Before starting the data setting method zero point return after power on,
always perform JOG operation, etc. to rotate the servomotor more than one
revolution.
Failure to do so will cause an error on the servo amplifier side.
If an error occurs, rotate the servomotor more than one revolution, and then
perform the data setting method zero point return again.
When the data setting method zero point return ends normally, the servo
amplifier side error is automatically reset.