



















9 - 2
MELSEC-
A
9 MAIN POSITIONING CONTROL
9.1 Outline of main positioning controls
"Main positioning controls" are carried out using the "positioning data" stored in the
D75P2.
The basic controls such as position control and speed control are executed by setting
the required items in this "positioning data", and then starting that positioning data.
The control method for the "main positioning controls" is set in setting item "
Da.2
Control method" of the positioning data.
Control defined as a "main positioning control" carries out the following types of control
according to the "
Da.2 Control method" setting.
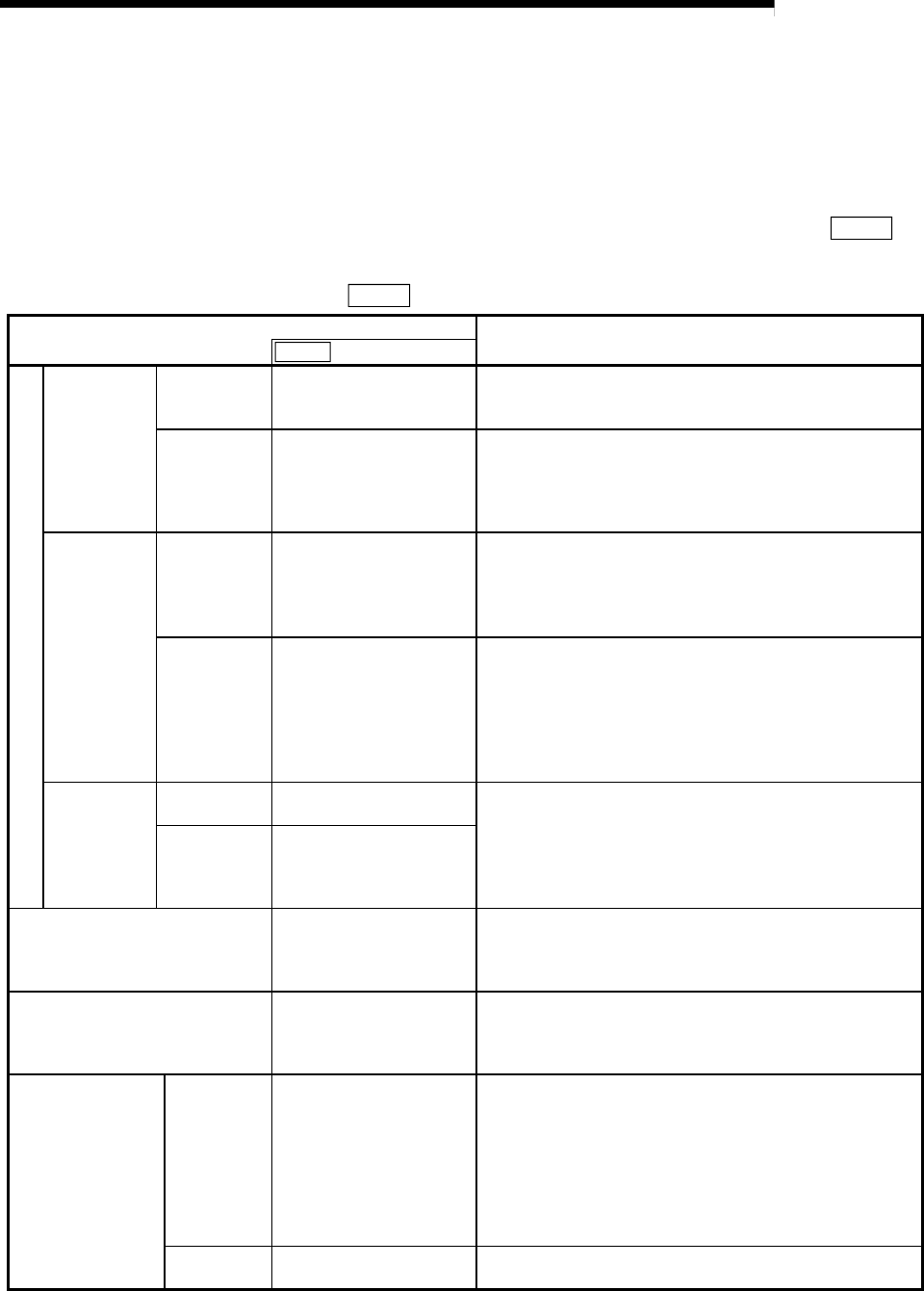
Main positioning control
Details
Da.2 Control method
Position control *
Linear control
1-axis linear
control
ABS Linear 1
INC Linear 1
Positioning is carried out in a linear path to a position
designated by the address and movement amount set in
the positioning data.
2-axis linear
interpolation
control *
ABS Linear 2
INC Linear 2
The axis in which the interpolation control method is set is
regarded as the reference axis. Positioning is carried out in
a linear path to a designated position, while controlling the
other axis (interpolation axis) to match the positioning data
set in the reference axis.
Fixed-
dimension
feed control
1-axis fixed-
dimension
feed control
Fixed-dimension feed 1
The workpiece is positioned the movement amount
designated by the movement amount set in the positioning
data.
(The "Current feed value (RWrn + 0 to 1, RWrn + 8 to 9)"
is set to "0" at the start.)
2-axis fixed-
dimension
feed control *
Fixed-dimension feed 2
The axis in which the interpolation control method is set is
regarded as the reference axis. Positioning is carried out in
a linear path for the designated movement amount, while
controlling the other axis (interpolation axis) to match the
positioning data set in the reference axis.
(The "Current feed value (RWrn + 0 to 1, RWrn + 8 to 9)"
is set to "0" at the start.)
2-axis circular
interpolation
control *
Auxiliary point
designation
ABS Circular interpolation
INC Circular interpolation
The axis in which the interpolation control method is set is
regarded as the reference axis. Positioning is carried out in
an arc path to a designated position, while controlling the
other axis (interpolation axis) to match the positioning data
set in the reference axis.
Center point
designation
ABS Circular right
ABS Circular left
INC Circular right
INC Circular left
Speed control
Forward run
Speed control
Reverse run
Speed control
Pulses are continuously output corresponding to the
command speed set in the positioning data.
Speed/position changeover
control
Forward run
speed/position
Reverse run
speed/position
The control is continued as position control (positioning for
the designated movement amount) by turning ON the
"speed/position changeover signal" after first carrying out
speed control.
Other control
Current value
change
Current value change
The "Current feed value (RWrn + 0 to 1, RWrn + 8 to 9)" is
changed to an address set in the positioning data.
This can be carried out by either of the following 2
methods.
(The machine feed value cannot be changed.)
Current value change using the positioning data
Current value change using the current value change
start No. (No. 9003).
JUMP
command
JUMP command
An unconditional or conditional JUMP is carried out to a
designated positioning data No.
* In "2-axis linear interpolation control", "2-axis fixed-dimension feed control", and "2-axis circular interpolation control",
control is carried out so that linear and arc paths are drawn using a motor set in two axis directions. This kind of control
is called "interpolation control". (Refer to section "9.1.6 Interpolation control" for details.)