

















5 - 55
MELSEC-
A
5 DATA USED FOR POSITIONING CONTROL
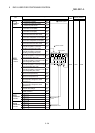
[Table 1]
Pr.11
setting value
Pr.1
setting value
Value set with peripheral device
(unit)
Value set with sequence program
(unit)
0 : Standard mode
0 : mm
–214748364.8 to 214748364.7 (
m)
–2147483648 to 2147483647 (
10
-1
m)
1 : inch –21474.83648 to 21474.83647 (inch)
–2147483648 to 2147483647 (
10
-5
inch)
2 : degree –21474.83648 to 21474.83647 (degree)
–2147483648 to 2147483647 (
10
-5
degree)
3 : pulse –2147483648 to 2147483647 (pulse) –2147483648 to 2147483647 (pulse)
1 : Stepping motor
mode
0 : mm
–13421772.8 to 13421772.7 (
m)
–134217728 to 134217727 (
10
-1
m)
1 : inch –1342.17728 to 1342.17727 (inch)
–134217728 to 134217727 (
10
-5
inch)
2 : degree –1342.17728 to 1342.17727 (degree)
–134217728 to 134217727 (
10
-5
degree)
3 : pulse –134217728 to 134217727 (pulse) –134217728 to 134217727 (pulse)
Pr.56
Zero point return torque limit value
For the machine zero point return, set a value to limit the torque of the servomotor
after starting the deceleration to the creep speed.
Refer to section "12.4.2 Torque limit function" for details on the torque limits.
Pr.57
Speed designation during zero point shift
Set the operation speed for when a value other than "0" is set for "
Pr.55 Zero
point shift amount". Select the setting from "
Pr.48 Zero point return speed" or
"
Pr.49 Creep speed".
0 : Designate "
Pr.48 Zero point return speed" as the setting value.
1 : Designate "
Pr.49 Creep speed" as the setting value.
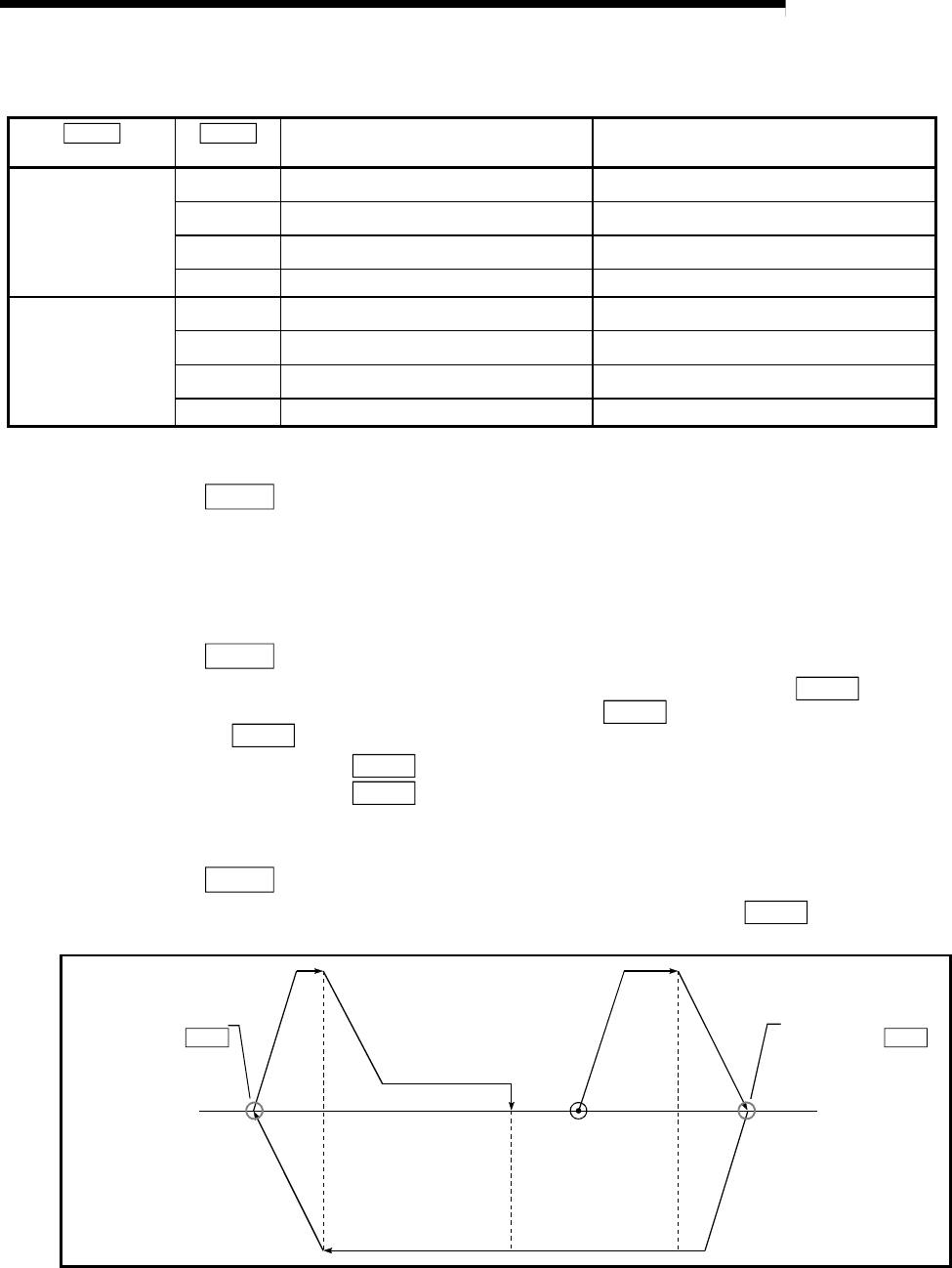
Pr.58
Dwell time during zero point return retry
When zero point return retry is validated (when "1" is set for
Pr.50 ), set the stop
time after decelerating in 2) and 4) in the following drawing.
Start position
T
emporarily stop for
t
he time set in Pr. 58
Temporarily stop for
the time set in Pr. 58
1) 2)
3)
4)
5)
6)