


















2 - 8
MELSEC-
A
2 SYSTEM CONFIGURATION
2.4 Precautions for use
Precautions for use of D75P2
(1) Necessity of AD75 Software Package
When using the D75P2, preset the positioning data to the D75P2 using the AD75
Software Package.
(2) About D75P2 functions
The D75P2 has the basic functions (functions indicated in (a)) that can be
achieved by use of cyclic transmission and the functions (functions indicated in
(b)) that can be achieved by use of transient transmission.
Since the functions that can be achieved by use of transient transmission require
access to the D75P2 buffer memory, they are more complicated in sequence
program and further take longer processing time than the basic functions that can
be achieved by use of cyclic transmission.
It is recommended to use them in applications that will not require fast
processing.
The following gives the "functions that can be achieved by cyclic transmission
only" and the "functions that require transient transmission".
* Refer to section "1.3 Outline of communication" for cyclic transmission and
transient transmission.
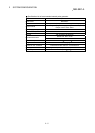
(a) Functions that can be achieved by cyclic transmission only
The following gives the functions that can be achieved by use of cyclic
transmission only.
Among the D75P2 functions, it is recommended to use the following
functions (main and auxiliary functions) only.
Function Reference
Main functions
Zero point return control
Machine zero point return control Section 8.2
Data setting method zero point return control Section 8.3
High-speed zero point return control Section 8.4
Main positioning control
Position control
1-axis linear control Section 9.2.2
2-axis linear interpolation control Section 9.2.3
1-axis fixed-dimension feed control Section 9.2.4
2-axis fixed-dimension feed control
(interpolation)
Section 9.2.5
2-axis circular interpolation control
Section 9.2.6
Section 9.2.7
Speed control Section 9.2.8
Speed/position changeover control *
1
Section 9.2.9
Other control
Current value change Section 9.2.10
JUMP command Section 9.2.11
Advanced positioning control
*
2
Block start
Section 10.3
Condition start
Wait start
Simultaneous start
Stop
Repeated start (FOR loop)
Repeated start (FOR condition)
Manual control
Manual pulse generator operation *
3
Section 11.3
JOG operation Section 11.2